 (8.8)
(8.8)现在我们来考虑电容器充电时所需的能量。如果电荷Q已从电容器的一个导体移至另一导体,则它们之间的势差为:
(8.8)
式中C为该电容器的电容。电容器充电时需做多少功呢?按照上面对球体的做法,我们设想电容器是逐步把小的电荷增量dQ从它的一板移至另一板而进行充电的。转移电荷dQ所需的功为:
dU=VdQ.
将式(8.8)中的V代入,则可以写成:
或者,从零电荷到最后电荷量Q进行积分,则有:
 (8.9)
(8.9)
这个能量也可写成:
 (8.10)
(8.10)
若回忆起一个导电球体(相对于无限远处)的电容为
C球体 =4π∈0 a,
则可立即由式(8.9)得到一个带电球的能量:
 (8.11)
(8.11)
当然这也是一个带有总电荷Q的薄球壳 的能量,而且恰好就是式(8.7)所给出的一个均匀带电 球体能量的5/6。
现在,我们讨论静电能概念的应用。试考虑下述问题:施于电容器两板间的力多大?或者,当存在另一异号电荷的导体时,绕带电导体某个轴的力矩是多少?这些问题,应用上述电容器的静电能式(8.9),再加上虚功原理(第1卷第4、13和14章),就不难回答。
让我们运用这一方法来求平行板电容器两板间的作用力。若我们设想两板的间距增加一小量Δz,那么外界对于移动这两板所做的机械功应为
ΔW=FΔz, (8.12)
式中F为两板间的力。这功必定等于电容器的静电能的变化。
根据式(8.9),电容器原来的能量为:
这能量的变化(如果不让电量变化的话)为:
 (8.13)
(8.13)
使式(8.12)和(8.13)两者相等,则有
 (8.14)
(8.14)
这也可以写成:
 (8.15)
(8.15)
当然,该力是由两极板上电荷的吸引造成的。但我们不必为电荷如何分布的具体细节而操心,我们所需要的一切都由电容C来对付。
不难看到,如何将这个概念推广到任意形状的导体以及关于力的其他分量上去。在式(8.14)中,我们可用所要寻求的力的分量代替F,并用在相应方向上的小位移来代替Δz。或者,若有一个带轴的电极,而希望知道该力矩τ,则可将虚功写成:
ΔW=τΔθ,
式中Δθ是小角位移。当然,Δ(1/C)必须是与Δθ相对应的1/C的变化。按照这一办法,我们能够求得如图8-3所示的那种可变电容器中作用于可动片上的力矩。
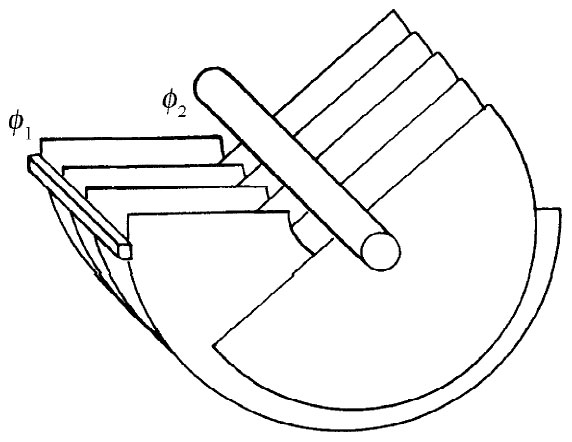
图8-3 作用于一可变电容器上的力矩有多大
再回到平行板电容器的特殊情况,我们可应用第6章中已导出的关于电容的公式:

式中A是每块板的面积。如果两板间距增大Δz,则
由式(8.14)可以得到作用于两板间的力为:
 (8.17)
(8.17)
让我们对式(8.17)更仔细地考察一下,并看看能否说出力是怎样来的。若把其中一板上的电荷写成
Q=σΑ,
式(8.17)则可以重新写成
人们会立即猜想到,作用于板上的力,应等于板上的电荷Q乘以作用于该电荷的场。但我们却有一个令人惊奇的因子 。原因是,E0
并非作用于
电荷的场。如果设想在板表面上的电荷占据一薄层,如图8-4所示,则场将从这一层的内边界上的零变化至在板外空间里的E0
。作用于面电荷上的平均场乃是E0
/2。这就是式(8.18)中为什么出现因子
的原因。
。原因是,E0
并非作用于
电荷的场。如果设想在板表面上的电荷占据一薄层,如图8-4所示,则场将从这一层的内边界上的零变化至在板外空间里的E0
。作用于面电荷上的平均场乃是E0
/2。这就是式(8.18)中为什么出现因子
的原因。
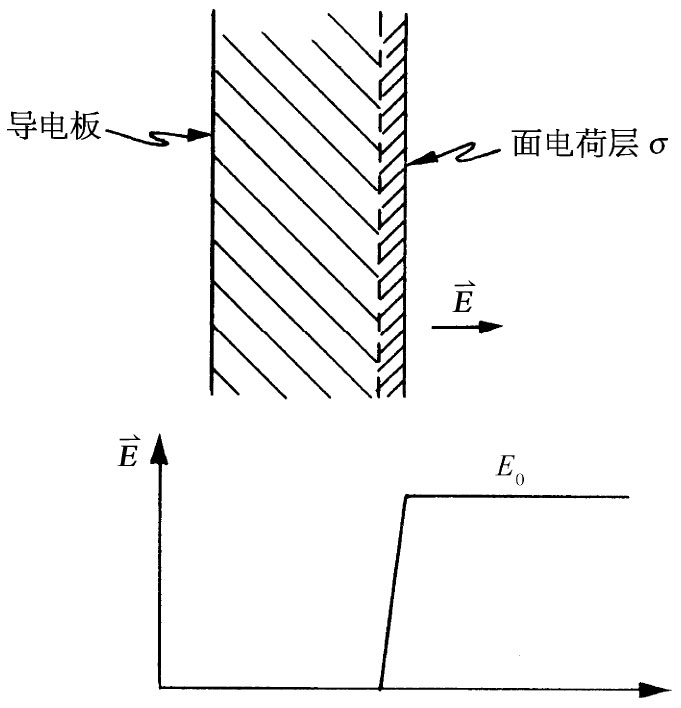
图8-4 导体表面上的电场,当穿过该表面的电荷层时,由零变至E0 =σ/∈0
你应注意,在计算虚功时,我们曾假定在电容器上的电荷保持不变——即在电的方面电容器不与其他东西连接,从而总电荷不能改变。
要是设想当电容器做虚位移时,其电势差保持不变。那么就应当取
而且代替式(8.15),我们现在应有
它给出一个大小等于式(8.15)的力(因为V=Q/C),但却带有相反的符号!很遗憾,当我们把电容器和它的充电源断开时,电容器两板间的作用力肯定不会改变符号。并且,我们还知道,带有异号电荷的两板一定互相吸引。在这第二种情况下,虚功原理已被误用——我们未把充电时对电源所做的虚功计算在内。这就是说,当电容变化时,要保持电势V为常数,电荷VΔC就必然要由电荷源来提供。但这一电荷是在势为V时提供的,因而保持电势不变的那个电力系统所做的功就是V2
ΔC。机械功FΔz加上
这个电功V2
ΔC共同构成电容器总能量的变化 。因此,如同上面一样,FΔz仍然是
。因此,如同上面一样,FΔz仍然是 。
。