 给出运动参考系中的
给出运动参考系中的 。由于Aμ
=(ϕ,A)是一个四维矢量,所以这些变换式看来几乎像式(25.1)一样,只是t应以ϕ代,而x则用A代。于是,
。由于Aμ
=(ϕ,A)是一个四维矢量,所以这些变换式看来几乎像式(25.1)一样,只是t应以ϕ代,而x则用A代。于是,虽然变换规律已隐含在上述内容中,但现在还是把它写下来,它用一个静止参考系中的
给出运动参考系中的
。由于Aμ
=(ϕ,A)是一个四维矢量,所以这些变换式看来几乎像式(25.1)一样,只是t应以ϕ代,而x则用A代。于是,
这里假定带撇的坐标系是以速率v沿正x方向运动,而这速率则是在不带撇的坐标系中测得的。
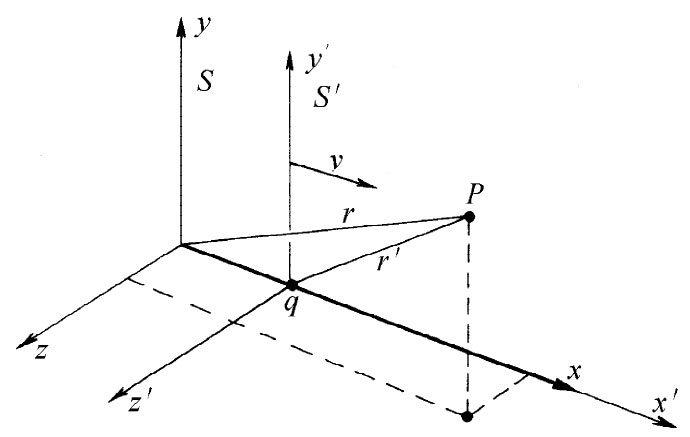
图25-2 参照系S′以速度v(沿x方向)相对于S系运动。在S′系中原点的一个静止电荷在S系中处于x=vt的地方。P点的势可以在两个参照系的任一个中算出来
我们要来讨论四维势概念用途的一个例子。以速率v沿x轴运动的电荷q,其矢势和标势是什么呢?这一问题在随电荷运动的坐标系中很简单,因为在这个系统中电荷是静止的。让我们假设,这电荷位于S′参照系的原点,如图25-2所示。于是在这个系统中的标势为
 (25.25)
(25.25)
式中r′是从q至场点的距离,即在运动系统中所测到的。当然,矢势A′为零。
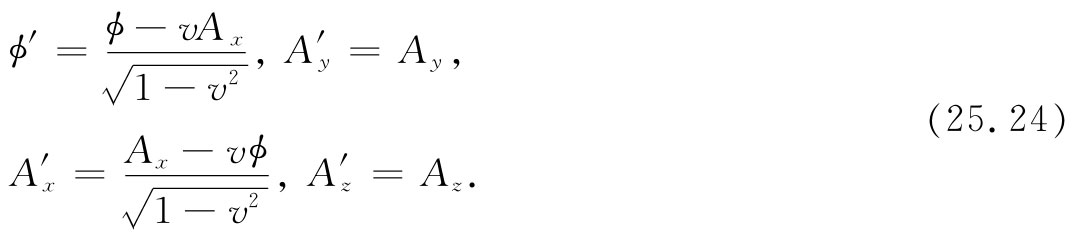
现在去求在静止坐标系中的测得的势ϕ和A是直截了当的。式(25.24)的逆变换关系为
利用由式(25.25)所给出的 ,可得
,可得

这向我们提供了在S系中可能观察到的标势ϕ,但可惜是,这是用S′的坐标表示的。还可以利用式(25.1),将t′,x′,y′和z′的各式代入得到用t,x,y,z表示出来的式子。我们得

对于A的各个分量,按照相同的手续,你可以证明
A=vϕ. (25.28)
这些都是在第21章中用别的方法推导出来的相同公式。